Event submissions
Events1st International Electronic Conference on Actuator Technology: Materials, Devices and Applications
Published
 10.3390/IeCAT2020-08479 (registering DOI)
10.3390/IeCAT2020-08479 (registering DOI) This submission belongs to the session D. Miniaturized and micro-actuators of the event 1st International Electronic Conference on Actuator Technology: Materials, Devices and Applications
Published date
20 Nov, 2020
Citation
Vitor Vlnieska, Achim Voigt, Sagar Wadhwa, Jan Gerrit Korvink, Manfred Kohl, Kirill Poletkin, Development of Control Circuit for Inductive Levitation Micro-Actuators, in Proceedings of 1st International Electronic Conference on Actuator Technology: Materials, Devices and Applications, 23 November–27 November 2020, MDPI: Basel, Switzerland, doi: 10.3390/IeCAT2020-08479
Share
Email
Facebook
Twitter
LinkedIn
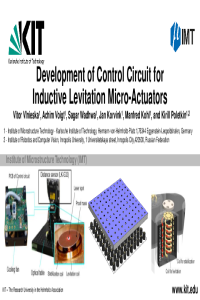
Development of Control Circuit for Inductive Levitation Micro-Actuators
'%3e%3cpath%20d='M12.6647%2010.9104C12.4176%2010.325%2012.0589%209.7933%2011.6088%209.34485C11.16%208.89511%2010.6283%208.53653%2010.0432%208.28891C10.038%208.28629%2010.0327%208.28498%2010.0275%208.28236C10.8437%207.69282%2011.3743%206.73252%2011.3743%205.64907C11.3743%203.85423%209.92005%202.40002%208.12522%202.40002C6.33038%202.40002%204.87618%203.85423%204.87618%205.64907C4.87618%206.73252%205.40677%207.69282%206.22296%208.28367C6.21772%208.28629%206.21248%208.2876%206.20724%208.29022C5.62031%208.53783%205.09365%208.89287%204.64167%209.34616C4.19192%209.79496%203.83334%2010.3266%203.58573%2010.9117C3.34247%2011.4846%203.21128%2012.0987%203.19925%2012.721C3.1989%2012.735%203.20135%2012.7489%203.20646%2012.7619C3.21157%2012.7749%203.21924%2012.7868%203.22901%2012.7968C3.23877%2012.8068%203.25045%2012.8148%203.26334%2012.8202C3.27623%2012.8256%203.29007%2012.8284%203.30406%2012.8284H4.09012C4.14776%2012.8284%204.19362%2012.7825%204.19493%2012.7262C4.22113%2011.7148%204.62726%2010.7676%205.34519%2010.0497C6.08802%209.30686%207.07452%208.89811%208.12522%208.89811C9.17592%208.89811%2010.1624%209.30686%2010.9052%2010.0497C11.6232%2010.7676%2012.0293%2011.7148%2012.0555%2012.7262C12.0568%2012.7839%2012.1027%2012.8284%2012.1603%2012.8284H12.9464C12.9604%2012.8284%2012.9742%2012.8256%2012.9871%2012.8202C13%2012.8148%2013.0117%2012.8068%2013.0214%2012.7968C13.0312%2012.7868%2013.0389%2012.7749%2013.044%2012.7619C13.0491%2012.7489%2013.0515%2012.735%2013.0512%2012.721C13.0381%2012.0947%2012.9084%2011.4856%2012.6647%2010.9104ZM8.12522%207.90243C7.52388%207.90243%206.95792%207.66793%206.53214%207.24215C6.10636%206.81636%205.87185%206.2504%205.87185%205.64907C5.87185%205.04773%206.10636%204.48177%206.53214%204.05599C6.95792%203.63021%207.52388%203.3957%208.12522%203.3957C8.72655%203.3957%209.29252%203.63021%209.7183%204.05599C10.1441%204.48177%2010.3786%205.04773%2010.3786%205.64907C10.3786%206.2504%2010.1441%206.81636%209.7183%207.24215C9.29252%207.66793%208.72655%207.90243%208.12522%207.90243Z'%20fill='%235D1EE1'/%3e%3c/g%3e%3c/svg%3e)
Vitor Vlnieska 1
Achim Voigt 2
Sagar Wadhwa 2
Jan Gerrit Korvink 2

Manfred Kohl 2

Kirill Poletkin 2,3
1. Karlsruhe Institute of Technology - Institute of Microstructure Technology, Germany
2. Karlsruhe Institute of Technology - Institute of Microstructure Technology
3. Innopolis University - Institute of Robotics and Computer Vision
Abstract
The control circuit for inductive levitation micro-actuators is developed in this research. The circuit performance and its electrical parameters are discussed. The developed control circuit was fabricated on a 4-layer PCB board having a size of 60 mm by 60 mm. It consists of a generator based on high-speed Flip-Flop components and a current amplifier build on a bridge configuration. The circuit is able to generate ac current with squared shape in a range of frequency from 8 to 43 MHz and with peak-to-peak amplitude up to 420 mA. To demonstrate the efficiency of the developed circuit and its compatibility with the micro-actuation system, an inductive levitation micro-actuator was fabricated by using 3D micro-coil technology. The device was composed of two solenoidal coil design, which consists of levitation and stabilization coil, having 2 mm and 3.8 mm in diameters, respectively. The levitation coil has 20 turns of a gold wire of a 25 µm diameter, while the stabilization one has 12 turns similar to the micro-structure presented previously by our group. Using the developed control circuit, the micro-actuator was successfully excited and it demonstrated the actuation of aluminum disc-shaped micro-objects having a diameter of 2.7 and 3.2 mm and, for the first time, an aluminum square shaped micro-object having a side-length of 3.4 mm at a frequency of 10 MHz. To characterize the actuation, the levitation height and the rms amplitude of current were measured. In particular, we showed that the square shaped micro-object can lift up on a height of 100 µm with rms current of 160 mA. The characterization is supported by the simulation using a 3D model based on the quasi-FEM approach.
Keywords
micro-actuators
micro-systems
levitation
Manuscript
sciforum-035708-final.pdf
Poster
Vlnieska_et_all_PPT_IeCAT-Control_circuit_for_ILMA_eng.pdf
A method for smoothly disengaging the load-holding valves of energy-efficient electro-hydraulic systems
Origami-Inspired Shape Memory Folding Microactuator